VectorNavIMU惯性导航系统VN300
产品别名 |
VN300惯导开发套件,惯性导航系统 |
面向地区 |
|
VectorNav IMU惯性导航系统
品牌:VectorNav Technologies
型号:VN-300
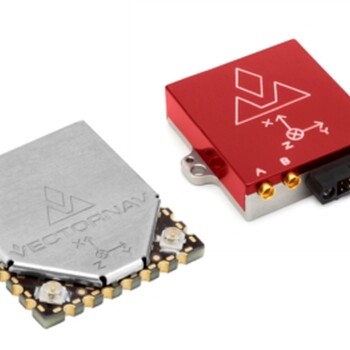
VectorNav微型双天线 GNSS 辅助惯性导航系统
VectorNav IMU惯性导航系统VN300,这是一款微型双天线 GNSS 辅助惯性导航系统 ,结合了 MEMS 惯性传感器、两个高灵敏度 GNSS 接收器和的卡尔曼滤波算法,可提供位置、速度、和方向。通过利用两个立的 GNSS 接收器和天线,VN-300 无需依赖车辆动力学或磁传感器即可实现的航向测量,从而在静态和动态条件下提供的性能。
主要优点:
0.3° GPS 罗盘航向
0.3°动态航向
0.1° 动态俯仰/横滚
5°/小时陀螺仪运行偏差(典型值)
800 Hz IMU、400 Hz 导航数据
±16 g 加速度计范围
±2000°/秒陀螺仪范围
热校准
SMD 和坚固型封装
双 GNSS 罗盘算法
VN-300 能够在静态和动态条件下准确估计真实航向(相对于真北的方位角),而无需依赖磁传感器。这是通过利用 GPS 干涉测量技术来实现的,该技术可以测量车辆或平台的航向,而无需对车辆动力学进行任何假设(RTK 移动基线技术)。对于在启动时需要航向的应用程序,或者在运动不足以执行动态对准的情况下,这是一个至关重要的功能。
GNSS-Compass 算法的主要特点包括:
磁立
AHRS、INS 和 GNSS 罗盘之间的自动转换
可调节 GNSS 天线基线长度,缩短启动时间或提高航向精度
航向精度介于 0.15° 和 1.2° (RMS) 之间
2分钟内启动
原始伪距、多普勒和载波相位输出
其它相关产品:
VN-100 Heading : 2.0° Pitch/Roll : 0.5°
VN-110 Static Pitch/Roll :<0.05
VN-200 Dynamic Heading Accuracy : 0.2°
VN-210 Dynamic Heading : 0.05?- 0.1
VN-300 GNSS-Compass Heading (1m) : 0.15° - 0.3°
VN-310 GNSS-Compass Heading (1m) : 0.15° - 0.3°